Emerita Burrowing Robot
A collaborative research project from UC Berkeley’s Embodied Dexterity Group
EMBUR (EMerita BUrrowing Robot) is a bioinspired robot designed to dig into granular media using only its legs. Inspired by the Pacific mole crab, our team reimagined how robots could navigate extreme terrains such as granular media (e.g. sand).
Collaborators: Dr. Laura Treers, Dr. Robert J. Full, Dr. Ben McInroe, Karl Skeel, Jiachen Su, Rushawn Childers, Dr. Hannah Stuart, and myself.
Designing from Nature
Many modern robots can walk, swim, or fly, but few can self-burrow.
Moving through sand is notoriously difficult for robots because particles can damage components, and upward forces resist against digging.
Yet, animals like the Pacific mole crab can dig rapidly and efficiently.
The First Embur
Inspired by the mole crab, our lab designed EMBUR 1.0, the first robot to self-burrow using only its legs.
Similar to mole crabs, EMBUR’s legs sweep outward and counter-rotate to burrow downward.
While this robot could dig itself downward, EMBUR’s maximum burrowing depth was limited by its unstable body pitch.
Our Goal
To redesign EMBUR to enable deeper, more reliable burrowing—paving the way for applications in planetary exploration, geotechnical engineering, and agriculture.
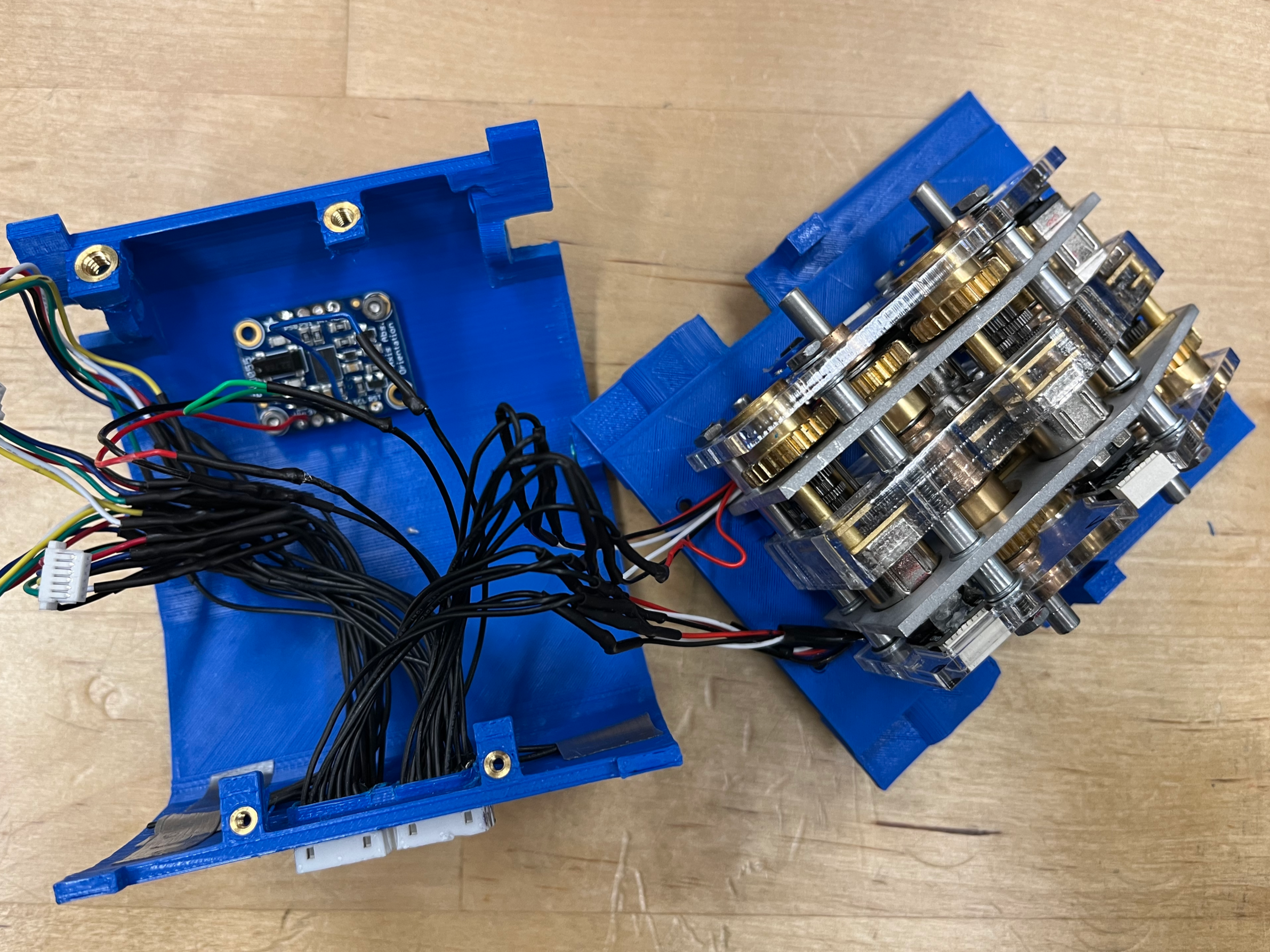
An internal view of EMBUR’, showing the robot’s chassis (right) and IMU (left).
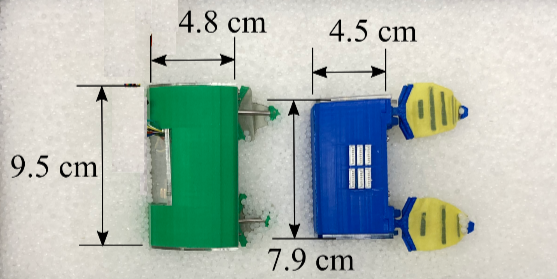
A side-by-side comparison of EMBUR 1.0 (green) to EMBUR 2.0 (blue).
EMBUR was redesigned to be more compact and powerful, with independent motors for each leg and an inertial measurement unit for feedback control — enabling deeper, more reliable self-burrowing.
By implementing gait switching, the robot could adjust its leg motions in real time to stabilize body pitch — enabling deeper, more reliable self-burrowing.

Results
EMBUR 2.0 achieved 65% greater maximum burrowing depth compared to EMBUR 1.0
This research work is now under review at IEEE Robotics and Automation Letters (RA-L)
I secured a NASA Space Technology Graduate Research Opportunity (NSTGRO) fellowship to examine and determine design constraints and considerations for burrowing on the Moon.

Personal Contribution
I joined the project after EMBUR’s first prototype. My contributions focused on control design, testing, and analysis:
Programmed velocity and position controllers for EMBUR 2.0
Ran trials across different substrates (plastic pellets vs. poppy seeds) and gait variations.
Redesigned the 3D printed shell and internal wiring to minimize troubleshooting needs.
Co-designed a new control policy using gait switching to stabilize body pitch
Conducted Granular Resistive Force Theory (RFT) simulations and visualized data
Presented research at NASA Kennedy Space Center, NASA Ames, APS Global Physics Summit, and the Bay Area Robotics Symposium
Co-authored figures and sections of a manuscript submitted to IEEE RA-L